|
copasi API
0.1
|
|
copasi API
0.1
|
#include <CTrajectoryMethod.h>
Public Types | |
| enum | Status { FAILURE = -1, NORMAL = 0, ROOT = 1 } |
Public Member Functions | |
| CTrajectoryMethod (const CTrajectoryMethod &src, const CCopasiContainer *pParent=NULL) | |
| ~CTrajectoryMethod () | |
| void | setCurrentState (CState *currentState) |
| void | setProblem (CTrajectoryProblem *problem) |
| virtual void | stateChanged () |
| virtual Status | step (const double &deltaT) |
| virtual void | start (const CState *initialState) |
| const CVector< C_INT > & | getRoots () const |
| virtual bool | isValidProblem (const CCopasiProblem *pProblem) |
Static Public Member Functions | |
| static CTrajectoryMethod * | createTrajectoryMethod (CCopasiMethod::SubType subType=CCopasiMethod::deterministic, CTrajectoryProblem *pProblem=NULL) |
Protected Member Functions | |
| CTrajectoryMethod (const CCopasiMethod::SubType &subType, const CCopasiContainer *pParent=NULL) | |
Protected Attributes | |
| CState * | mpCurrentState |
| CTrajectoryProblem * | mpProblem |
| CVector< C_INT > | mRoots |
| CTrajectoryMethod::CTrajectoryMethod | ( | const CCopasiMethod::SubType & | subType, |
| const CCopasiContainer * | pParent = NULL |
||
| ) | [protected] |
Default constructor.
| const | CCopasiMethod::SubType & subType |
| const | CCopasiContainer * pParent (default: NULL) |
Default constructor.
| CTrajectoryMethod::CTrajectoryMethod | ( | const CTrajectoryMethod & | src, |
| const CCopasiContainer * | pParent = NULL |
||
| ) |
Copy constructor.
| const CTrajectoryMethod & | src |
| const | CCopasiContainer * pParent (default: NULL) |
Copy constructor.
| const CTrajectoryMethod & | src |
| CTrajectoryMethod::~CTrajectoryMethod | ( | ) |
Destructor.
| CTrajectoryMethod * CTrajectoryMethod::createTrajectoryMethod | ( | CCopasiMethod::SubType | subType = CCopasiMethod::deterministic, |
| CTrajectoryProblem * | pProblem = NULL |
||
| ) | [static] |
Create a trajectory method for a special problem. Note: the returned object has to be released after use with delete a problem is also passed so that the method has a chance to choose an appropriate simulation method.
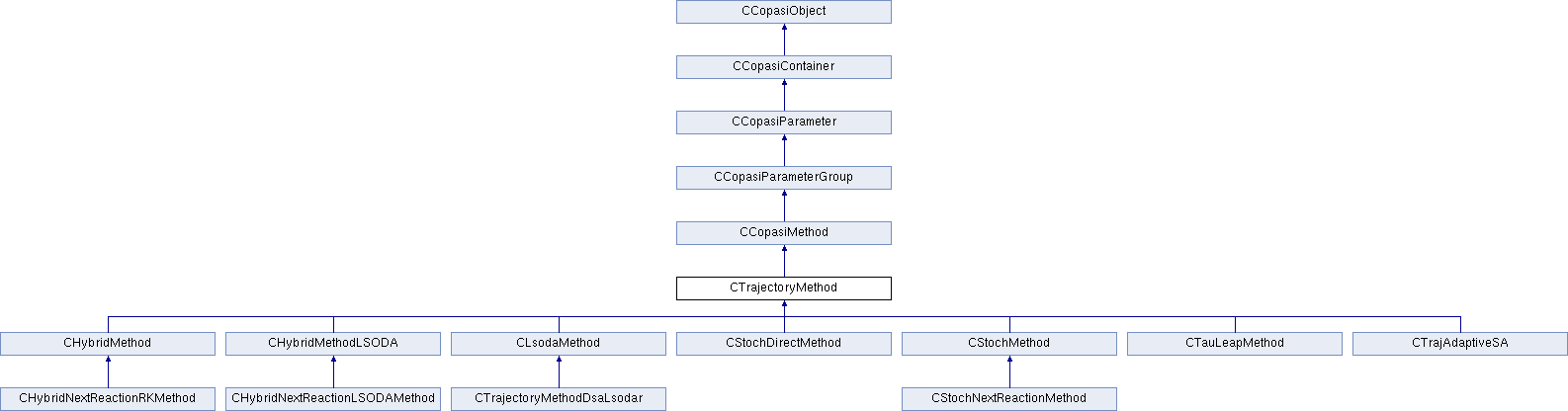
CTrajectoryMethod class. This class describes the interface to all integration methods. The various method like LSODA or Gillespie have to be derived from this class.
Created for COPASI by Stefan Hoops 2002
| const CVector< C_INT > & CTrajectoryMethod::getRoots | ( | ) | const |
Retrieve the roots.
| bool CTrajectoryMethod::isValidProblem | ( | const CCopasiProblem * | pProblem | ) | [virtual] |
Check if the method is suitable for this problem
Reimplemented from CCopasiMethod.
Reimplemented in CTrajectoryMethodDsaLsodar, CStochMethod, CTrajAdaptiveSA, CHybridMethodLSODA, CStochDirectMethod, CHybridMethod, and CTauLeapMethod.
| void CTrajectoryMethod::setCurrentState | ( | CState * | currentState | ) |
Set a pointer to the current state. This method is used by CTrajectoryTask::process() The results of the simulation are passed via this CState variable
| CState * | currentState |
| void CTrajectoryMethod::setProblem | ( | CTrajectoryProblem * | problem | ) |
Set a pointer to the problem. This method is used by CTrajectory
| CTrajectoryProblem * | problem |
| virtual void CTrajectoryMethod::start | ( | const CState * | initialState | ) | [virtual] |
This instructs the method to prepare for integration starting with the initialState given.
| const CState * | initialState |
Reimplemented in CTrajectoryMethodDsaLsodar, CLsodaMethod, CStochMethod, CTrajAdaptiveSA, CHybridMethodLSODA, CStochDirectMethod, CHybridMethod, and CTauLeapMethod.
| void CTrajectoryMethod::stateChanged | ( | ) | [virtual] |
Inform the trajectory method that the state has changed outside its control
Reimplemented in CTrajectoryMethodDsaLsodar, and CLsodaMethod.
| virtual Status CTrajectoryMethod::step | ( | const double & | deltaT | ) | [virtual] |
This instructs the method to calculate a time step of deltaT starting with the current state, i.e., the result of the previous step. The new state (after deltaT) is expected in the current state. The return value is the actual timestep taken.
| const double & | deltaT |
Reimplemented in CTrajectoryMethodDsaLsodar, CLsodaMethod, CStochMethod, CTrajAdaptiveSA, CHybridMethodLSODA, CStochDirectMethod, CHybridMethod, and CTauLeapMethod.
CState* CTrajectoryMethod::mpCurrentState [protected] |
A pointer to the current state. This is set from outside with the setState() method and never changed anywhere else. It's used to report the results to the calling TrajectoryTask
CTrajectoryProblem* CTrajectoryMethod::mpProblem [protected] |
A pointer to the trajectory problem.
CVector< C_INT > CTrajectoryMethod::mRoots [protected] |
Vector containing information on the current roots
 1.7.5.1
1.7.5.1

